ⓐ Localizer Approach
- 주변 지형으로 인해 G/S 설치가 불가능하거나 G/S이 고장 났을 때 제공 가능한 접근 절차
- Horizontal guidance만을 제공하는 비정밀접근 절차
- Localizer는 활주로와 항상 3˚ 내에 정대되어 있으며 Final approach area에서 최소 250ft 장애물 회피 제공
ⓑ LOC/DME Approach
- Localizer 외 DME 장비가 추가적으로 설치되어 Approach에 필요한 거리 정보 제공
ⓒ Localizer Back Course Approach
- ILS가 설치되어 있는 곳에서는 Localizer와 함께 Back course 또한 사용 가능
- Localizer와 마찬가지로 Back course에서는 G/S을 제공하지 않으며 Back course에서는 잘못된 G/S signal을 제공할 수 있으므로
G/S 정보를 무시해야 함
- Standard VOR equipment를 사용할 경우에는 Reverse sensing이 나타날 수 있음 (HSI에서는 나타나지 않음)
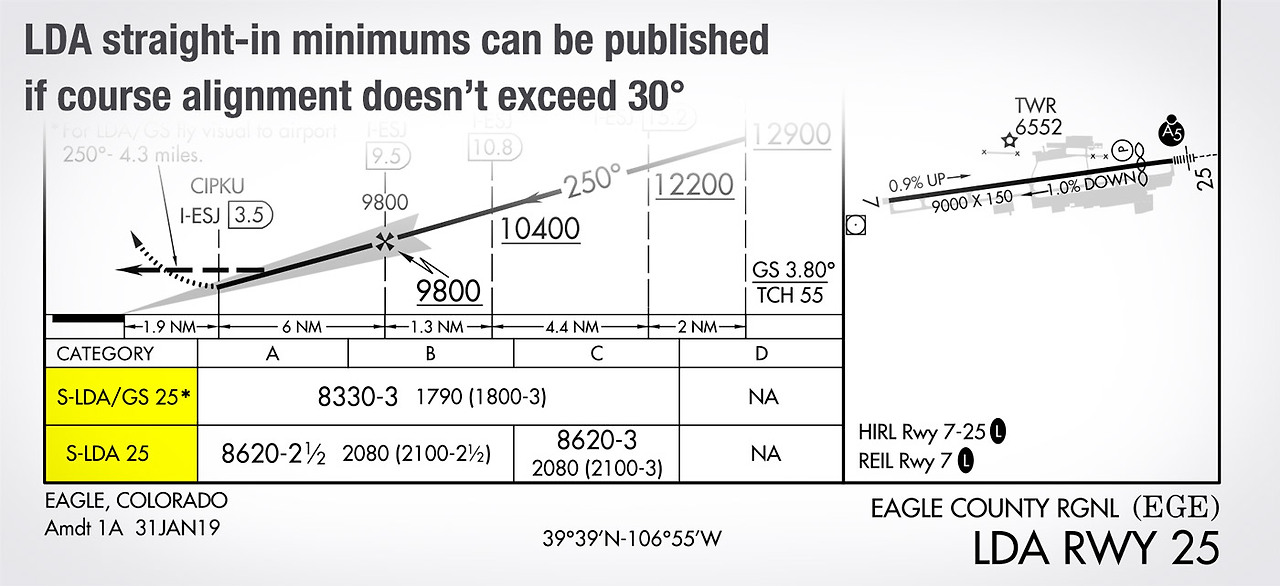
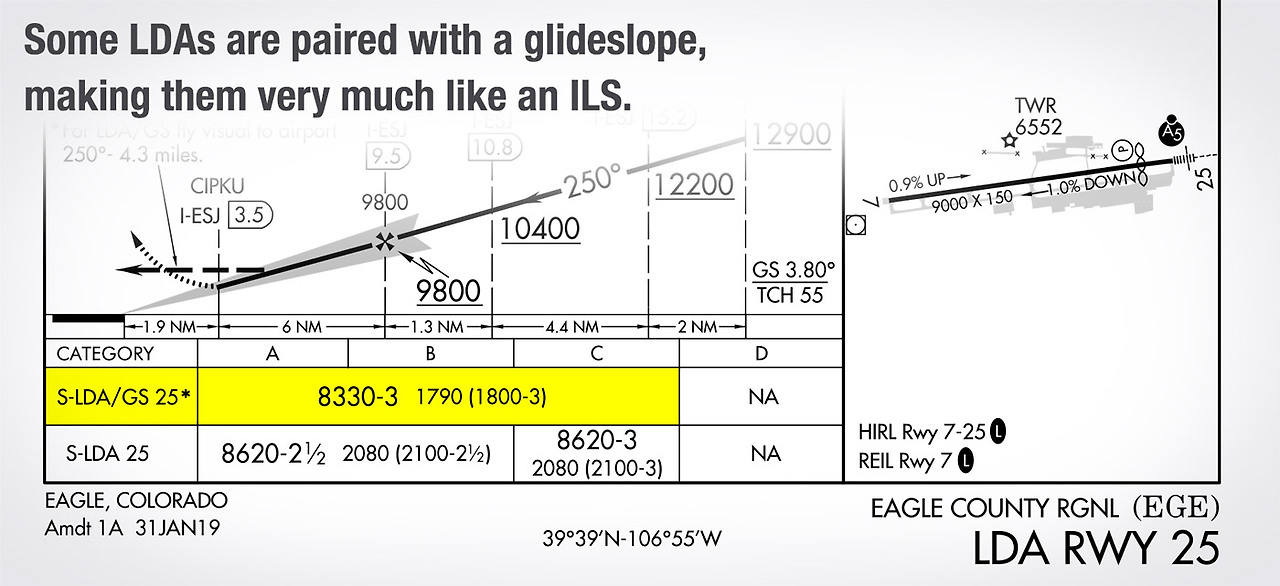
ⓓ Localizer-type Directional Aid (LDA)
- 활주로 Centerline에 정렬되지 않은 Localizer 형태 (3˚ 초과하여 정렬, 코드 1-OOO)
- LDA는 보통 G/S를 포함하지 않으나 G/S가 포함된 곳에서는 Approach chart에 표기
- 제공되는 Approach course 폭은 3~6˚이며, Localizer와 유사한 정확도를 보임
- FAC와 활주로 중앙선 간의 각도 차가 30˚ 이하인 곳에서 Straight-in minimum 적용 (30˚ 이상일 땐 Circling minimum 설정)



|
* SDF (Simplified Directional Facility)
|
'IFR Procedures' 카테고리의 다른 글
| [IFR] Approach Procedure (0) | 2025.03.18 |
|---|---|
| [IFR] Radar Approach (0) | 2025.02.28 |
| [IFR] VOR Approach (0) | 2025.02.28 |
| [IFR] ILS Approach (0) | 2025.02.28 |
| [IFR] Vertical Path Control on Non-precision Approach Procedures (0) | 2025.02.28 |