Navigation
가. 항법의 요소 & 목적
- 항법의 4대 요소 : 위치, 방향, 거리, 시간
- 항법의 3대 목적 : 위치확인, 침로결정, ETA 산출
나. 항법의 종류
ⓐ 지문항법 (Pilotage)
- 시계비행 상태에서 육안으로 확인되는 지상목표를 이용한 방법
- 특별한 장비 없이 쉽게 실시할 수 있으나, 기상이 나쁘거나 특별한 시각 참조물이 없는 대양이나 사막에서 사용 불가
ⓑ 추측항법 (Dead Reckoning)
- 해상, 야간 혹은 구름 속과 같이 지상 참조물을 보기 어려울 때 사용하는 방법
- 속도계, 고도계, 나침반, 시계(VFR 필수계기)를 이용하여 예상되는 경로를 비행
- 예보된 기상 정보를 사용하므로 바람의 정확한 예보가 필수적이며 시간 경과에 따른 오차 누적 발생
ⓒ 전자항법 (Electronic Navigation)
1. 무선항법 (Ravio Navigation)
- 지상의 무선국으로부터 송신된 전파를 수신하여 항공기 위치 확인 & 경로로 이용 (150 ~ 200NM 범위)
- ADF, VOR, DME, TACAN, VORTAC 등
- 지문항법이나 추측항법의 단점을 극복하고 항상 일정한 항로로 비행 가능
- 지상 항행안전시설의 위치에 의한 제약이 있음
2. LORAN (Long Range Navigation)
- 장거리 항법을 위한 시스템
- 지상 무선국으로부터 발사된 Pulse 신호의 도달 시간차를 이용하여 위치 확인
- 주/야간에 따른 신호 수신범위에 차이가 있음 (주간 700NM, 야간 1,400NM)
3. 레이더 항법 (Radar Navigation)
- 레이더에 의해 지형을 판단하여 항공기의 위치 확인
- Pilotage에 전파를 이용함으로써 정확도 향상
4. 도플러 레이더 항법 (Doppler Radar Navigation)
- 항공기의 도플러 레이더에서 전파를 발사하여 편류, GS 등의 정보를 얻어 항법에 이용
- Dead Reckoning에 전파를 이용함으로써 정확도 향상
ⓓ 최신항법
1. Grid Navigation
- 위도 60도 이상의 극지방에서 자오선 대신 Grid(인공자오선) 이용
- 자기 나침반 대신 자이로를 이용하여 대권을 비행하는 방법
2. 관성항법 (INS, Inertia Navigation System)
- 자이로, 가속도계, 항법 컴퓨터로 구성
- 항공기의 초기 기준 위치 결정, 자이로의 Rigidity in Space의 성질을 이용하여 각속도 측정
→ 3축 가속도계를 이용하여 항공기가 움직일 때 발생하는 선가속도(이동정보) 측정
→ 측정된 수치를 시간에 대해 적분하여 속도와 이동거리를 구하고, 이를 이용하여 항공기 위치 산출
- 출발 위치를 정확히 입력해 놓으면 외부의 도움 없이 항법이 가능하나, 비행거리와 비례하여 오차 누적
3. 위성항법 (GPS, Global Positioning System)
- 인공위성을 기반으로 매우 정밀한 위치와 속도 정보를 사용자에게 제공
- 36,000km 상공에서 24개 이상의 인공위성이 6개 궤도를 공전하며 위치, 속도, 시간 정보를 송신하고 GPS가 이를 받아 항법에 사용
다. Class Ⅰ vs Class Ⅱ 항법
ⓐ 목적
- 운항중인 항공기의 위치를 정확하게 확인하기 위하여 항행 장비, 무선시설, 기상장비 및 지형지물을 최대한 활용하여 안전운항을 도모
ⓑ Class Ⅰ항법
- ATC에서 요구하는 정확도로 항행할 수 있도록 ICAO 표준 지상 항행안전시설(VOR, VOR/DME, NDB)의 서비스 범위 내 이루어지는 항법
- MEA Gap 항로 상의 비행, 지상 항행시설에 의해 구성되는 RNAV 항로 비행도 포함 (단, Operational Service Volume 내에 있어야 함)
- Class Ⅰ항행 시 항행시설 기지국 상공 또는 교차점을 정확히 통과할 수 있어야 하며, 적어도 1시간에 1회 이상 정확도를 확인해야 함
ⓒ Class Ⅱ항법
- Class Ⅰ 이외의 운항 (ICAO 표준 지상 항행안전시설 범위 밖에서 이루어지는 항법)
- 보통 지상 항행안전시설의 신호가 미치지 못하는 대양이나 내륙 깊숙한 지역이 해당
마. 지역항법 (RNAV, Area Navigation)
ⓐ 정의
- 항공기가 지상 항행안전시설 or GPS의 유효 통달범위 내 또는 탑재된 INS 장비의 운용한계 내 위치를 확인하고 계획된 항로로 비행하는 방법
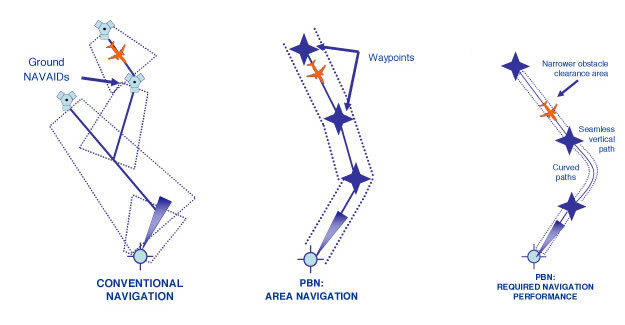
ⓑ Conventional 항법과의 비교
- Conventional 항법 : 지상의 항행시설들로부터 보내진 전파를 따라 비행. 항로는 지상항행시설에 의해 정해진 Fix들로 정의
- RNAV 항법 : Conventional 항법의 FROM-TO 원칙에 구애받지 않고 원하는 비행로로 직선비행 가능 ('Waypoint'로 경로 설정)
ⓒ RNAV 항법의 장점
- 효율적인 항로 설계로 공역 안에 더 많은 항공기 수용 가능
- 항로 거리가 줄어 비행시간 및 비용 절약
- 탄소 배출량 감소로 친환경적
ⓓ RNAV 항법에 필요한 장비 & 기타 사항
- VOR, DME, VOR/DME, GPS, INS 등
- RNAV 항법은 조종사의 책임 하에 수행되며, ATC는 모든 비행을 레이더로 감시
- Random RNAV 항로는 레이더 관제 하에서만 인가
- Waypoint는 ARTCC 경계구역으로부터 200NM 이내에 있어야 함
'Navigation' 카테고리의 다른 글
| [항법] ELT (0) | 2025.03.05 |
|---|---|
| [항법] Radar (0) | 2025.03.05 |
| [항법] Transponder (0) | 2025.03.05 |
| [항법] VOR/DME (0) | 2025.03.05 |
| [항법] Magnetic Compass (0) | 2025.03.05 |